 Laser capability is now included with all versions of BTB!
Laser capability is now included with all versions of BTB!
Laser Scanned Tracks provide the most accurate representation of real life tracks that is possible using today's technology. New technology allows the capture of
millions of points of data in order to capture the road and surrounding areas in
amazing detail.
A specialised version of Bobs Track Builder was designed to utilise that high
density point cloud data, then make track and terrain mesh that fits as close as possible to the real thing. This allows a very efficient workflow since the point
cloud data can be seen in the same package that produces most of the modelling required
to produce a track.
As of version 1.0.0.0, the Laser features are now included in BTB as standard. There is no longer a separate BTB Laser product.
Uses
Exported data can be used by rFactor, rFactor-Pro or customised for use in other racing simulations.
There are several common uses for such accurate data:
- Racing teams looking for that extra advantage can run and analyse vehicle simulation data as it runs against a copy of the upcoming event's track.
- Drivers can become familiar with every bump on the track without the large running costs that are usually involved. They can practice against other drivers either
on a LAN or over the internet.
- In some forms of motor sport, physical practice is governed and limited. Running simulations provides a way to gain extra testing that otherwise couldn't be performed.
- Gaming companies can produce more accurate representations of real-life places whilst performing the majority of the work in the one interface, all in the one cost-effective solution. With BTB-Laser you can easily produce several Level-Of-Detail models, so frame-rates stay high.
 Point Cloud Sources
Point Cloud Sources
There are several ways to collect data including:
- Land-based Laser scanning
- Aerial LiDAR
- GPS Real Time Kinematic (RTK)
BTB can load data from these sources and can even combine them in the one project for even greater accuracy.
Editing
Data is classified, edited all using the isometric and 3d views of Bobs Track Builder. Any noise within the data can be visualised and removed. This editing is necessary when data is collected whilst cars are still running on the track. Editing the data like this can allow for tracks to be scanned without the need for closing off the circuit.
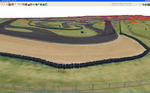
A designer can use BTB to map out a track and given accurate enough source data, it will be accurate to within a centimetre of the actual track.
Terrain can be added and it will follow the contours of the data, with each vertex automatically snapping to the point cloud data as it is added.
Walls, trees, buildings and all other objects that show up in point cloud data can be placed accurately in the scene using BTB's objects and wall tools. More of the track can be completed in the one BTB tool without the need for third party 3d design packages.
Analysis
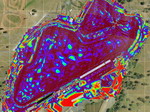
Analysis can be performed to ensure that the data is matching up to the mesh produced by BTB. A visual representation, like the one pictures here, shows in colour how much the points deviate from the actual surface produced. In this case each point cloud sample is on average only 1.314 centimeters from the polygon that represents the track, this is incredible given that the source of information is Aerial LiDAR.